RASPBERRY Pİ el yapımı kasa süreci

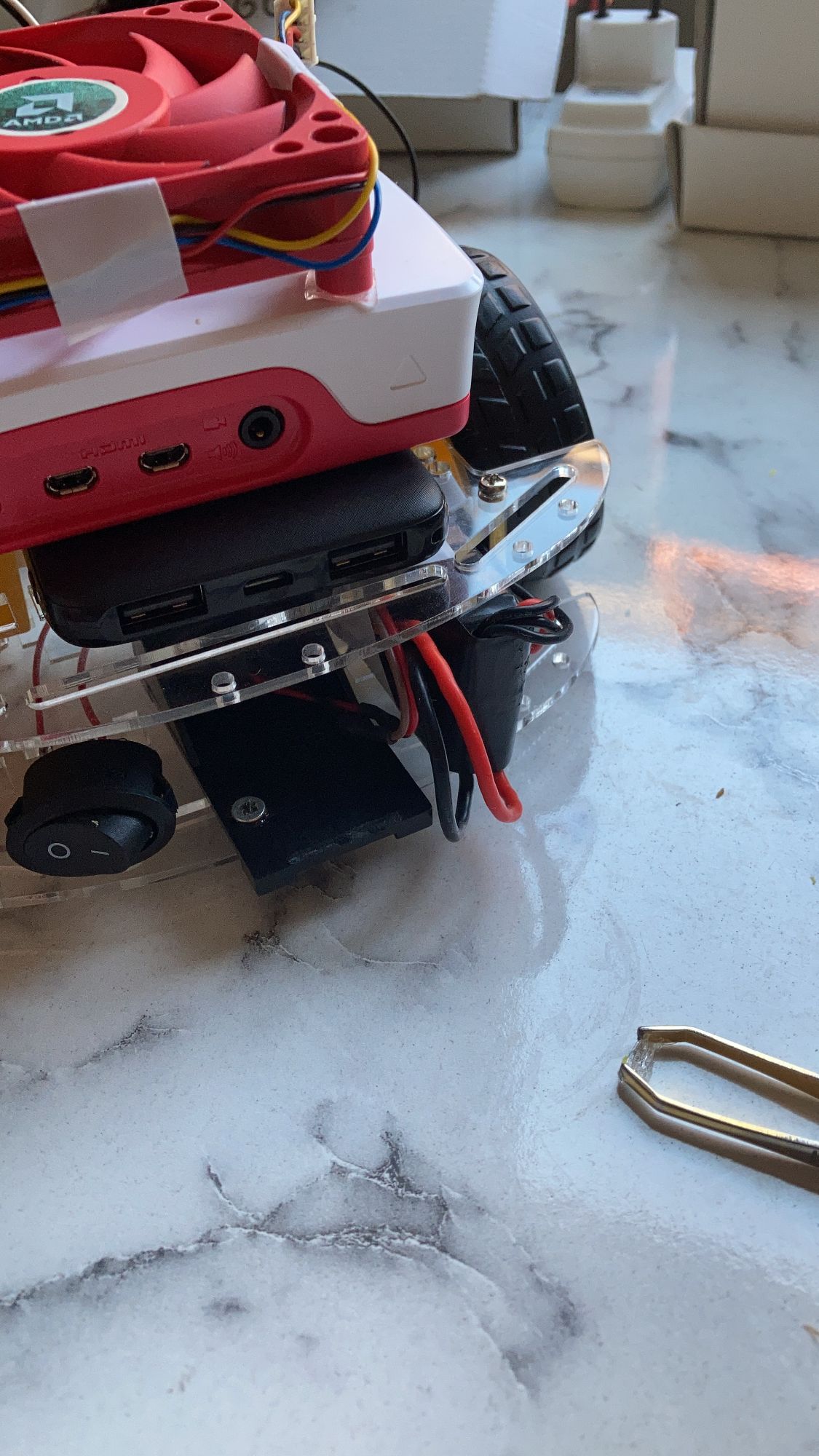
Raspberry Pi 4 modeli önceki modellere nazaran daha güçlü bir işlemci ve ram desteği ile kullanıcıya daha stabil bir deneyim sunuyor ancak kullanıcının baş etmesi gereken başka bir sorun doğuyor, bu da ısınma sorunu. Elbette basit projelerde işlemcinin ısınması herhangi bir tehdit oluşturmasa da kullanıcının beklentisi ve işlemlerinin hacmi arttıkça bu işlemcinin yavaşlaması gibi sorunlar doğuruyor. Ben de bunu engellemek adına ufak bir karton kutuya bilgisayar fanı ile beraber raspberry pi 4 modelini monte ettim.
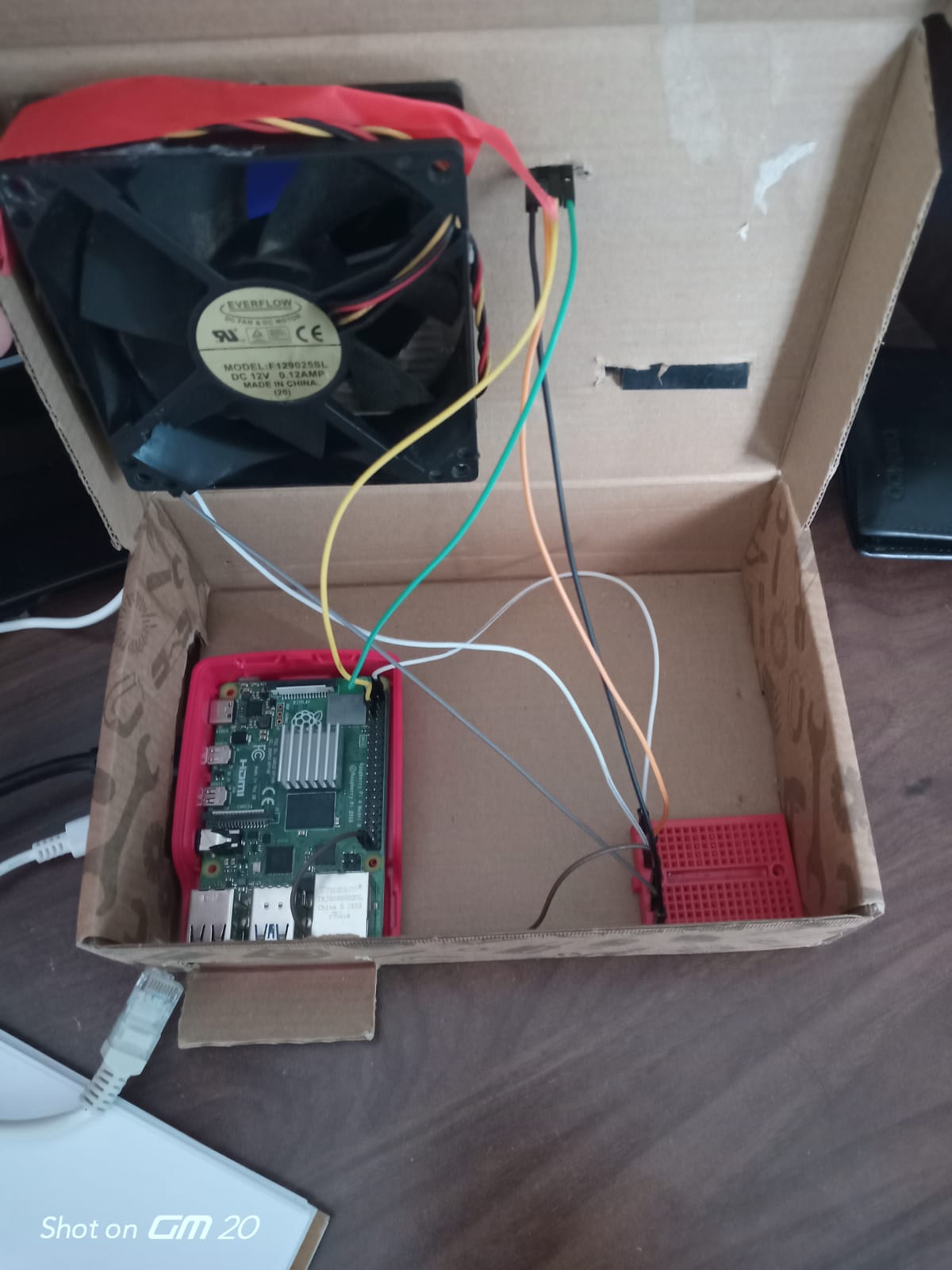
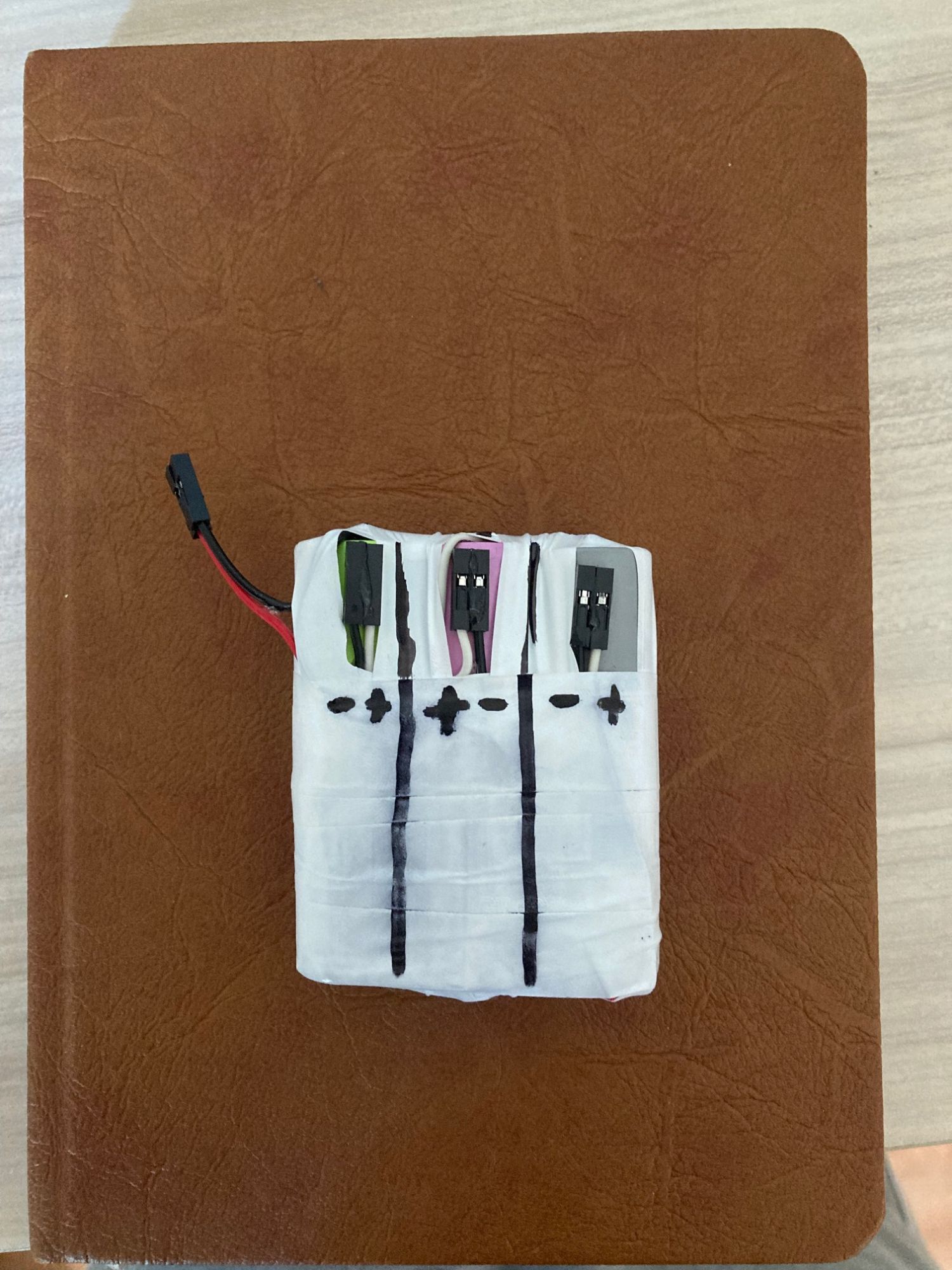
Karton kutunun iç dizaynı yandaki şekildeki gibi oldu. En sağdaki ufak breadboard yardımı ile güç raspberry pi güç pinlerini çoğalttım, bu da bana aynı anda raspberry ile çalışabilen başka modüllere de güç desteği sağladı. Böylelikle aynı anda hem raspberry ile hem de arduino gibi mikrodenetleyicileri harici bir güç kaynağı olmadan kullanabildim.
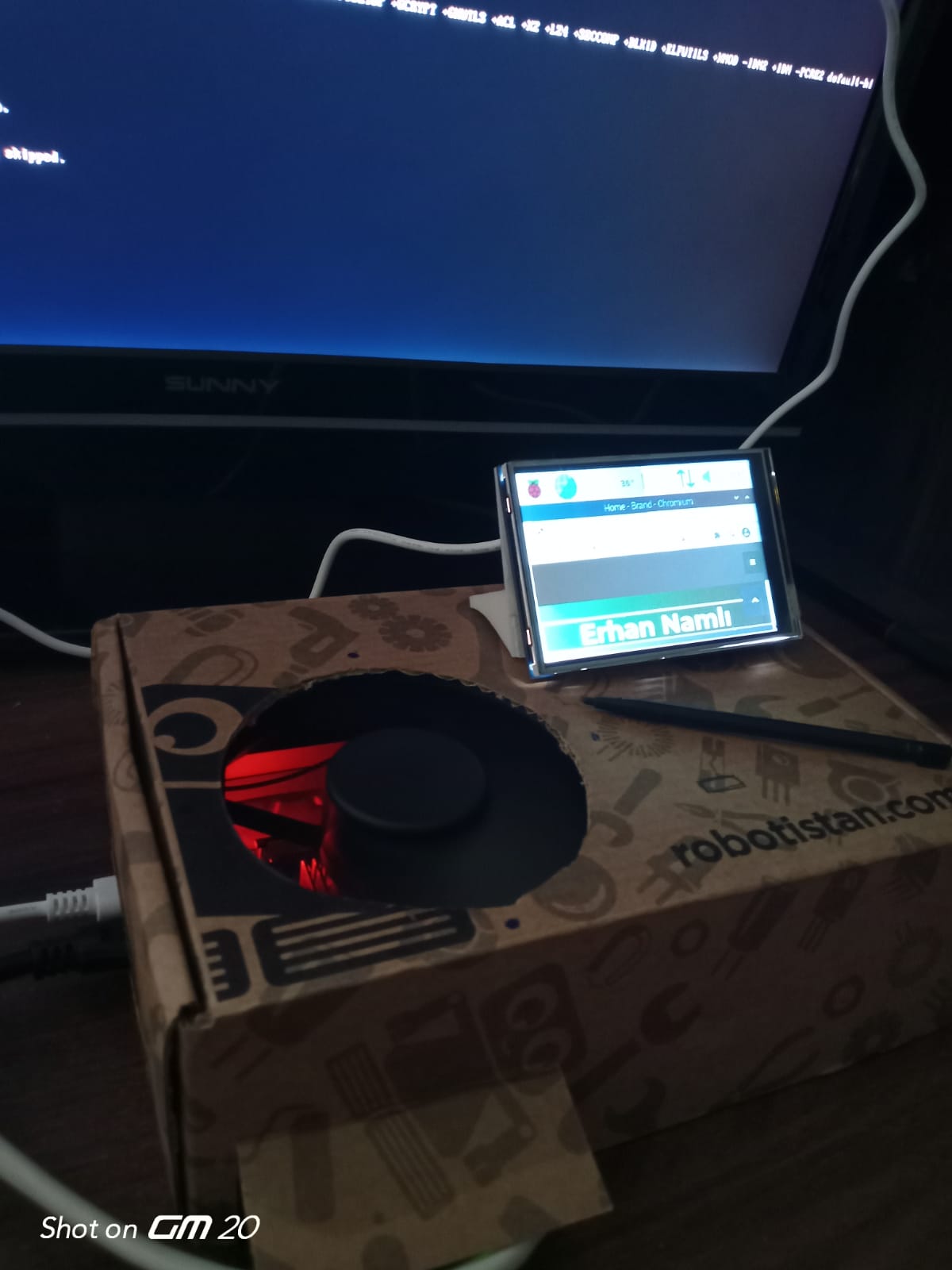
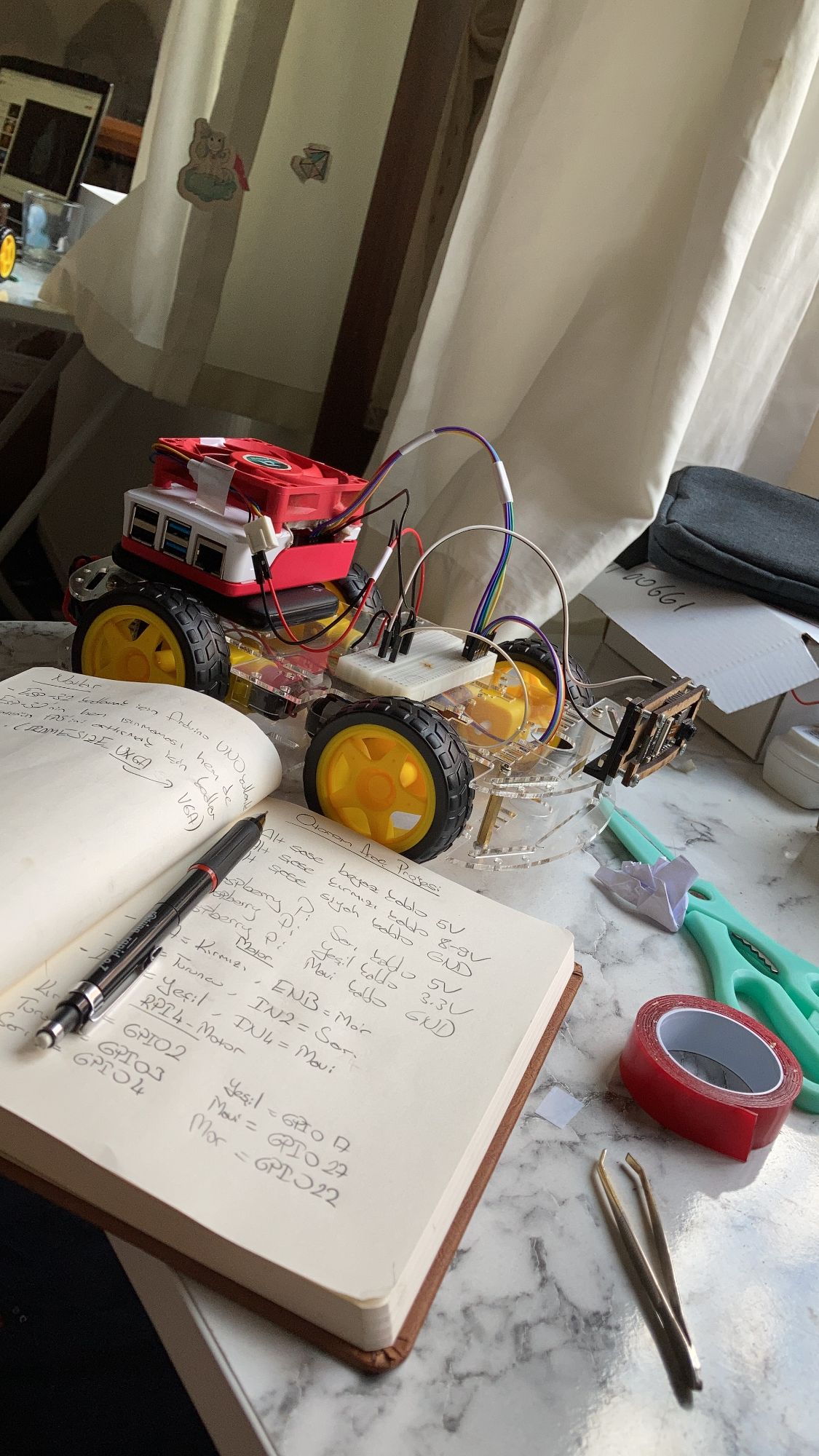
Yandaki fotoğrafta ise, 3.5 boyutunda dokunmatik LCD ekranla beraber raspberry işletim sistemini çalıştırabildim. Raspberry modellerinin kullanıcıya sağladığı en büyük özgürlük istenildiği gibi programlanabiliyor oluşu. Bu sayede akla gelebilecek her türden projeye ev sahipliği yapabiliyor. Bu projeyi yaparken raspberry pi forumlarından faydalandım.

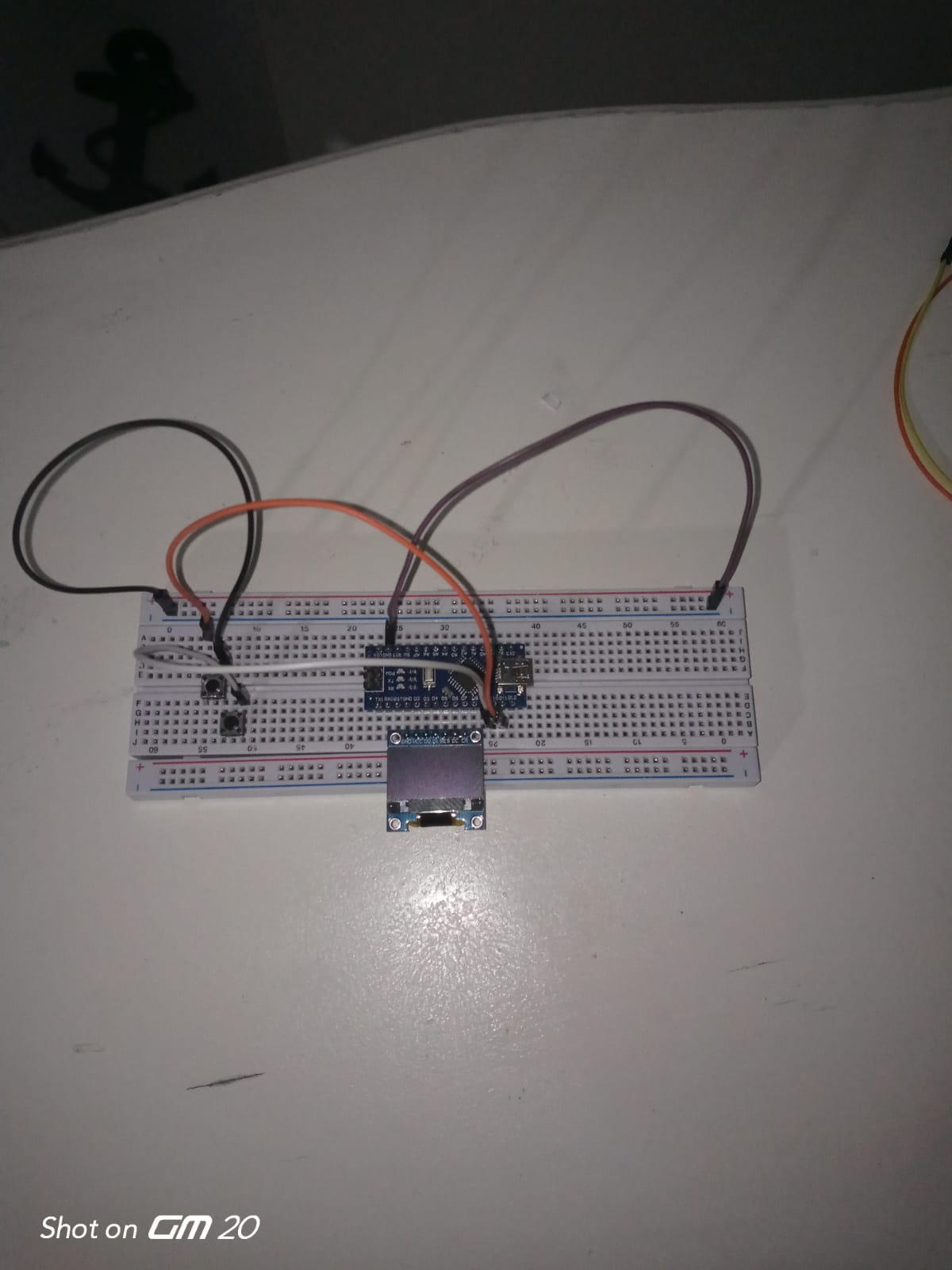
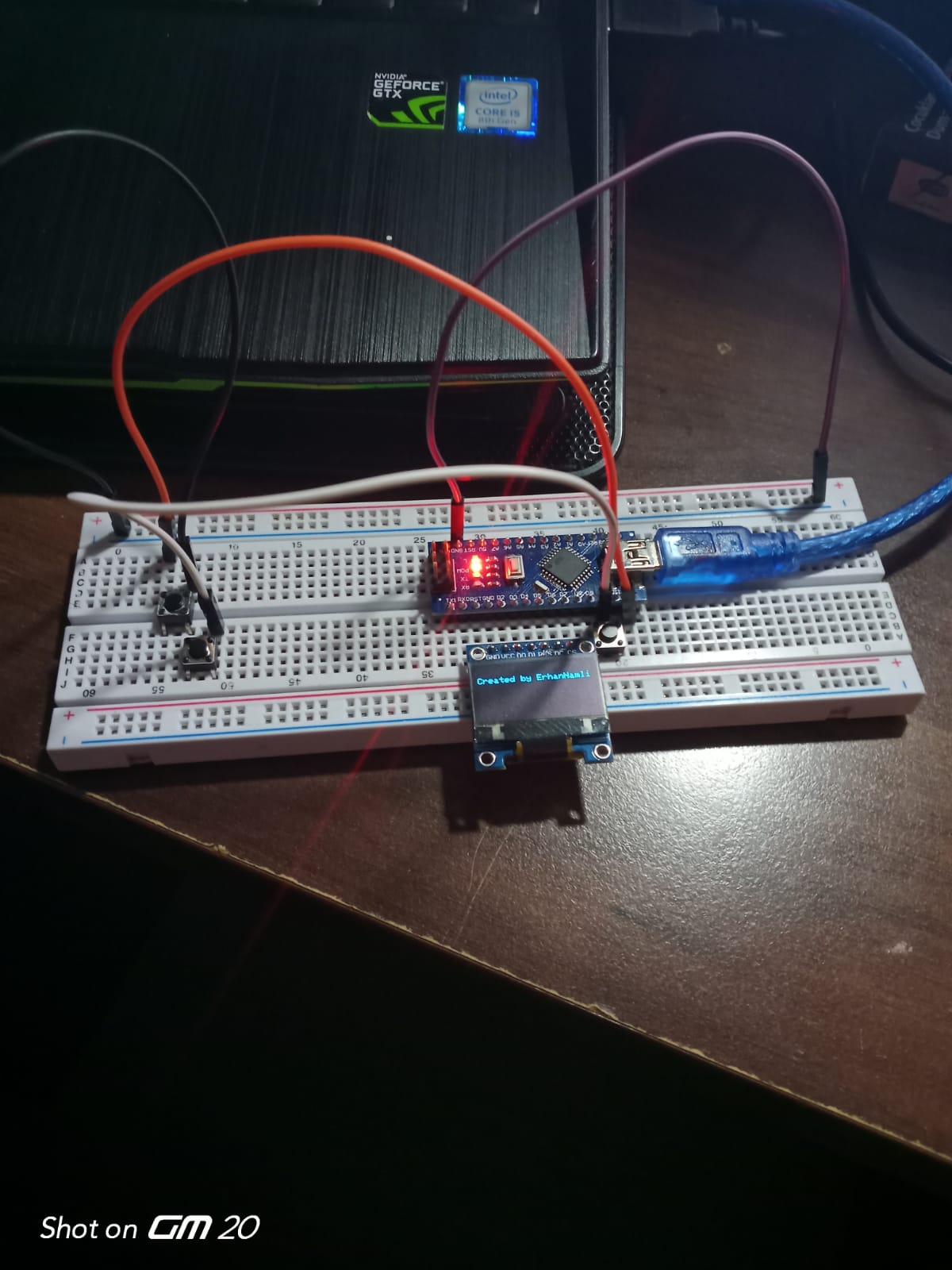
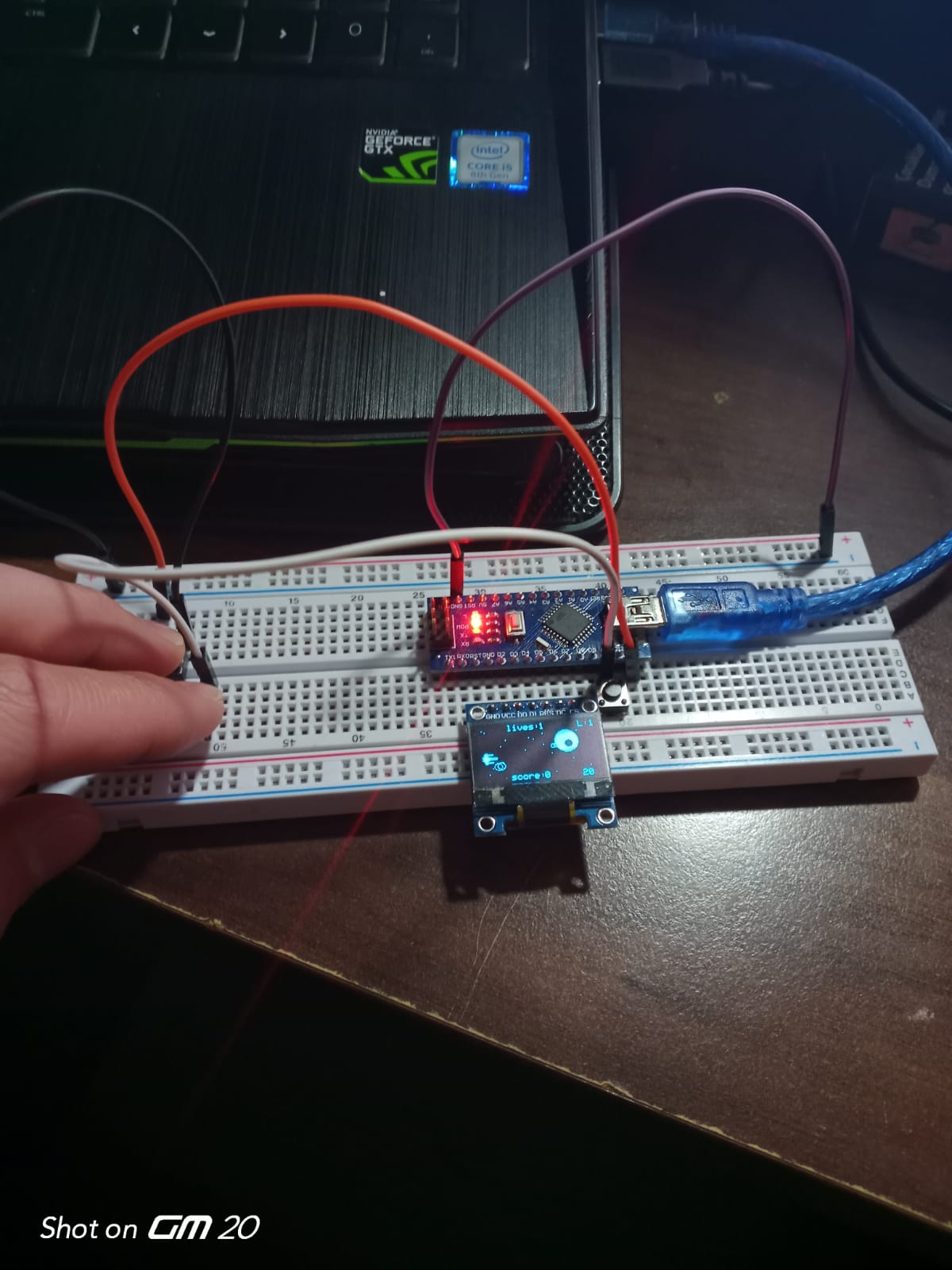
Bir sonraki adımım ise ufak bir i2c haberleşme sistemine sahip olan OLED ekran yardımı ile anlık olarak raspberry pi işlemci sıcaklığını gösteren bir uygulama yapmak oldu. Karton kutunun içerisine koyduğum ve bana ekstra güç pini sağlayan ufak breadboard oled ekranı çalıştırmamda bana yardımcı oldu.